Радиоуправление на 10 команд. Радиоуправление на микроконтроллере
Эта система радиоуправления предназначена для выполнения одной команды, в то-же время её модно расширить до четырёх-пяти команд. К её достоинствам можно отнести минимальные габариты платы приёмника, и сведение к минимуму числа его высокочастотных катушек. Систему можно использовать в каких-либо пусковых устройствах, в системе охранной сигнализации, персонального вызова, или дистанционного управления моделями и приборами.
Во всех этих случаях когда нудно дистанционное управление с расстояния до 500-500м в городе, и до 5000м в открытом пространстве или над водой.
Технические характеристики:
1. Рабочая частота канала............. 27,12 Мгц.
2. Мощность передатчика.............. 600 мВт.
3. Напряжение питания передатчика......... 9 В.
4. Ток потребления передатчиком............. 0,3 А.
5. Чувствительность приёмника............... 2мкв.
6. Селективность при расстройке на 10 кгц......... 36 дб.
7. Напряжение питания приемника........... 3,3-5В.
8. Ток потребления приёмника в покое............... 12 мА.
9. Ток потребления приёмником при срабатывании - 60 мА, и зависит от типа используемого реле.
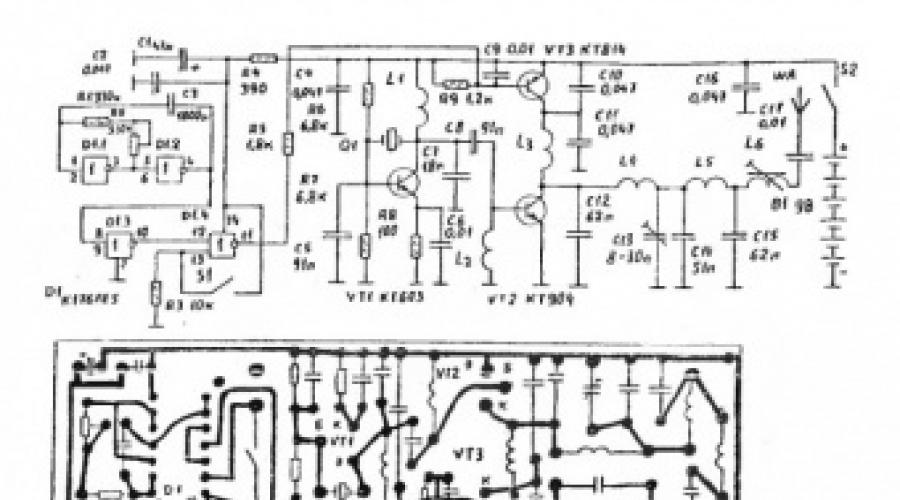
Принципиальная схема и монтажная приёмного тракта изображена на рисунке 1. Радиочастотный сигнал от антенны через переходной конденсатор С1 поступает в входной контур L1 С2 настроенный на частоту 27,12 Мгц. С выхода этого контура сигнал поступает на высокочастотный усилитель на полевом транзисторе VT1. Диод VD1 служит для ограничении исходного сигнала при не большом расстоянии между антеннами приёмника и передатчика.
Этот транзистор согласует несимметричный высокоомный выход контура с симметричным низкоомным входом микросхемы DA1, которая выполняет функции преобразователя частоты. Частота гетеродина определяется частотой резонанса резонатора Q1. В данном случае частота гетеродина 26,655 мгц. Сигнал промежуточной частоты 465 кгц выделяется на нагрузке преобразователя резисторе R3.
С этого резистора сигнал ПЧ через пьезокерамический фильтр Q2 (он определяет всю селективность) поступает на микросхему DA2, на которой выполнен усилитель промежуточной частоты, амплитудный детектор, система АРУ и усилитель низкой частоты. С выхода детектора микросхемы (выгод 8) низкочастотное напряжение амплитудой 50-100 мВ поступает через подстроечный резистор R8 на вход УЗЧ, который усиливает этот сигнал до 1,5 - 2 В.
Усиленный низкочастотный сигнал с вывода 12 микросхемы, через С1В поступает на каскад на транзисторе VT2. Это рефлексный ключевой каскад. Он усиливает переменное напряжение, которое с его коллектора поступает на колебательный контур L2 С19, настроенный на 1250 гц.
Если входное напряжение имеет эту частоту контур входит в резонанс и на катоде диода VD2 появляется постоянное напряжение, которое приводит к открыванию транзистора. Его коллекторный ток увеличивается и как только достигает значения срабатывания реле XS оно срабатывает и замыкает или размыкает своими контактами цепь устройства, подлежащего управлению.
Конструктивно приёмник собран на малогабаритной печатной плате, схема которой изображена в натуральную величину. Нужно использовать малогабаритные детали. Катушка L1 наматывается на цилиндрическом ферритовом стержне диаметром 2,8 мм и длиной 12 мм. Она содержит 14 витков провода ПЭВ-0,31. Наматывают её так, чтобы сердечник мог с некоторым трением двигаться в ней. Пьезокерамический фильтр тоже малогабаритный - ФГЛП061-02 на 465 кгц. Можно использовать и другой фильтр на эту частоту важно, чтобы габариты позволяли.
Реле - РЭС55 - герконовое, паспорт РС4.569.603. Это реле допускает ток коммутации до 0,25А. Можно использовать другое малогабаритное реле, например РЭС43 или РЭС44. Катушка низкочастотного контура L2 намотана на ферритовом кольце К7-4-2 из феррита 400НН, она содержит 350 витков провода ПЭВ-0,06.
Настройка ВЧ части приёмника сводится к настройке входного контура на частоту канала. Настройка каскада на VT2 сводится к установке режима таким образом, чтобы при выключенном модуляторе передатчика контакты реле находились в обесточенном положении. Режим устанавливают подбором R9, в некоторых случаях его можно исключить. R8 подстраивают таким образом, что-бы была максимальная чувствительность и при этом реле не срабатывало от шумов.

Принципиальная схема передатчика изображена на рисунке 2. Задающий генератор передатчика выполнен на VT1 с кварцевой стабилизацией частоты. Кварцевый резонатор Q1 выбран на частоту несущей - 27,12 Мгц. Напряжение этой частоты выделяется в дросселе L1 и через конденсатор С8 поступает на усилитель мощности на транзисторе VT2. Усиленное напряжение ВЧ выделяется на дросселе L3.
Для согласования с антенной используется двойной "51" образный контур на элементах L4, L5, С12, С13, С14 и С15. Он согласует по входному сопротивлению антенну и выход передатчика, и отфильтровывает гармоник несущей частоты. Катушка L6 используется для увеличения эквивалентной длины антенны и следовательно к увеличению отдаваемой энергии.
Для модуляции используется ключевой каскад на транзисторе VT3. При подаче на его базу отрицательного относительно эмиттера напряжения он открывается и подаёт питание на усилитель мощности.
Прямоугольные импульсы для управления модулятором вырабатывает мультивибратор на микросхеме D1. Частота генерации определяется конденсатором С3 и резисторами R1 и R2. Элемент D1.3 выполняет роль формирователя импульсов, а D1.4 выключателя модуляции.
В рабочем режиме при отсутствии команды питание поступает на передатчик (S2 замкнут). Тумблер S1 в этом случае замкнут, и на выходе элемента D1.4 устанавливается напряжение близкое к нулю (относительно минуса питания). Это напряжение является отрицательным по отношению к эмиттеру VT3. Оно через R5 поступает на базу этого транзистора и открывает его.
В результате в режиме отсутствия команды передатчик излучает не модулированный сигнал. Это нужно для того, чтобы забить высокочастотный тракт приёмника и исключить влияние на его работу электрических помех и атмосферных шумов. Для того, чтобы послать команду нужно разомкнуть тумблер S1. Тогда элемент D1.2 откроется и пропустит через себя прямоугольные импульсы от мультивибратора.
Передатчик будет излучать модулированный сигнал, реле приёмника сработает. Если нет опасности от помех и расстояние между приёмником и передатчиком небольшое можно исключить постоянное излучение, разомкнув S1 и посылать команды только замыкая S2. Такой режим нужно использовать при работе аппаратуры в охранном комплексе, так как занимать частоту на столь длительное время нельзя.
Передатчик смонтирован на печатной плате, рисунок которой в натуральную величину изображен на рисунке 2. В передатчике делать минимальные габариты платы не обязательно и можно использовать не такие малогабаритные детали как в приёмнике.
Микросхему К176ЛА7 можно заменить на K561ЛA7 или при изменении разводки платы на К564ЛА7. Транзистор VT1 можно использовать КТ608 с любой буквой, VT2 - КТ606, КТ907. VТ3 - KT816 или ГТ403.
Катушки передатчика L4 и L5 бескаркасные, они имеют диаметр 7 мм и длину 10 мм, L4 содержит 15 витков ПЭВ-0,61, L6 20 витков ПЭВ-0,56. Катушка L6 выполнена так-же как и катушка входного контура приёмника, она имеет ферритовый сердечник. Она содержит 18 витков ПЭВ-0,2. Дроссели L1, L2 и L3 наматываются на постоянных резисторах МЛТ-0,5 сопротивлением не менее 100-с проводом ПЭВ-0,16, по 40 витков. В качестве антенны используется штырь длиной 75 см.
Настройка
Передатчик настраивают при помощи волномера с индикатором напряженности поля или высокочастотным осциллографом (С1-65) с катушкой на входе. В обеих случаях тумблер S1 замыкают и измеряют напряжение на коллекторе VT3, оно должно быть близко к напряжению питании.
Затем с подключенной рабочей антенной путём сжатия и раздвигании витков L4 и L5, подстройкой С13 и изменяем индуктивности перемещением сердечника L6 добиваются максимального неискаженного синусоидального сигнала основной частоты (по ошибке можно настроиться на гармонику), регистрируемого волномером или осциллографом с расстояния около 1 метра от антенны.
Теперь можно включить модуляцию тумблером S1. Теперь на экране осциллографа должен быть виден модулированный сигнал если уменьшить период развёртки осциллографа на его экране появятся сплошные прямоугольники, они не должны иметь искажений и выбросов. Сопряжение низкочастотных настроек приемника и передатчика производится в передатчике подстройкой резистора по максимальной дальности срабатывания.
Если нужно сделать несколько команд нужно сделать переключатель, который будет коммутировать несколько резисторов R2. В приёмнике нужно сделать несколько каскадов, аналогичных каскаду на VT2, которые будут отличаться только емкостью С19, и и подключить их к точке "А" (рис.1). Рекомендуемые емкости С19 для четырёх команд - 0,15 мкф, 0,1 мкф, 0,068 мкф и 0,033 мкф.
После настройки все катушки передатчика и входную катушку приёмника нужно зафиксировать эпоксидной смолой.
Обратился к ко мне один человек с просьбой сделать ему ворота на радиоуправлении. Сначала мной было предложено разработать и создать плату с нуля, но подумав, было решено приобрести готовую с Китая. Так, для клиента, будет быстрее и дешевле.
В Китае был куплен вот такой модуль дистанционного управления четырьмя нагрузками + два пульта.
Китайцы как всегда батарейки в комплект не кладут, так что если надумали покупать, то пока будет идти товар, купите себе батарейки. Не знаю что размер батареек, но они на 12 вольт. По длине они короче мизинчиковых, но немного толще их.
Пока я ждал товар, товарищ передал мне посылку: однофазный конденсаторный электродвигатель; кнопочный пост; пускатели; концевики и провода.
Первая проблемой с которой я столкнулся, это было осуществление реверса. Разобраться мне в этом помог видео-ролик, где автор ОЧЕНЬ подробно рассказывает как собрать схему реверса и как ее подключить. К сожалению, схема не совсем проста для того, чтобы я смог ее нарисовать, но она проста в понимании и сборке.
После сборки пускателей в схему реверс и подключения кнопочного поста, нужно было подключить двигатель. С первого раза конечно же у меня ничего не получилось, но благодаря гуглу и опытам, я открыл для себя вот такую схему:
Из электродвигателя выходят четыре провода А, Б, Ц и Д. Тестером мы легко находим концы двух обмоток, но дальше встает вопрос, какая обмотка рабочая, а какая пусковая. Как я выяснил, рабочая обмотка ВСЕГДА будет иметь меньшее сопротивление. Теперь обратите внимание как я подключил ее. Конец Д всегда соединен с нулем питания. Так как в схематике реверс, работает только один пускатель при вращении в одну сторону, а при вращении в другую работает второй пускатель, то колодки 1 и 3 обеих пускателей были запараллелены и подключены с одной стороны к фазе питания, а другой к выводу Ц рабочей обмотки.
Реверс пусковой обмотки прост. Во входной части пускателей соединяем одинаковые клеммы 2 с 2 и 3 с 1 и подаем на них питание. На выходной стороне соединяем 2 с 1 и 3 с 2 и подключаем выходы Aи Б пусковой обмотки.
Теперь поговорим о подключении платы дистанционного управления. Она имеет 4 реле, но нам понадобится только 3. На плате есть джампер переключения функций включения реле. Устанавливаем джампер так, чтобы пока кнопка на пульте нажата, реле работает, когда кнопка отжимаем, выключается и реле.
Здесь тоже ничего сложно. Первое реле подключаем последовательно красной стоповой кнопке. Остальные реле подключаем паралельно пусковым кнопкам. Предварительно нужно сказать, что это нужно делать только после того, как посмотрите видео о схеме реверс.
Всем привет. Представляю на общее обозрение самодельный пульт радиоуправления для управления различными объектами на расстоянии. Это может быть машинка, танк, катер и т.д. изготовленное мной для “детского” радио кружка. С применением радио модуля NRF24L01 и микроконтроллера ATMEGA16.
Давно у меня лежала коробка одинаковых поломанных игровых джойстиков от приставок. Досталась от игрового заведения. Особого применения в неисправных игровых джойстиках я не видел, да и выкидывать или разбирать жалко. Вот и стояла коробка мертвым грузом пылилась. Идея применения игровых джойстиков, пришла, как только пообщался со своим приятелем. Приятель вел кружок для юных радиолюбителей в интернате, причем бесплатно по выходным, приобщал любознательных детишек к миру радиоэлектроники. Дети они ведь как губка, впитывают информацию. Так как я сам очень приветствую подобные кружки для детей, а тут еще и в таком месте. То и предложил идею, как задействовать нерабочие джойстики. Идея заключалась в следующем: создать самодельный радио дистанционный пульт управления моделями, собранными своими руками, который хотелось бы предложить детям для изучения проекта. Идея ему очень понравилась, учитывая, что финансирование детских учреждений мягко сказать не очень, да и мне был интересен данный проект. Пускай я тоже внесу свою лепту в развитие радио кружка.
Цель проекта создать законченное устройство не только как радио дистанционный пульт, но и ответную часть на радиоуправляемый объект. Учитывая, что пульт для детей то и подключение приёмной части на модель, также должно быть по возможности простым.
Сборка и комплектующие:

Разобрав игровой джойстик на составляющие, сразу стало ясно, нужно изготовить новую печатную плату, причем, весьма необычной формы. Сначала, хотел развести печатную плату на микроконтроллер ATMEGA48, но как оказалось портов микроконтроллера просто не хватает под все кнопки. Конечно, такое количество кнопок в принципе не нужно и можно было ограничиться только четырьмя портами микроконтроллера АЦП для двух джойстиков и два порта для тактовых кнопок, размещенных на джойстиках. Но мне захотелось по возможности максимально большое количество кнопок задействовать, кто знает, чего там детишки ещё захотят добавить. Так была рождена печатная плата под микроконтроллер ATMEGA16. Сами микроконтроллеры у меня были в наличии, остались от какого-то проекта.
Резинки на кнопках очень сильно были изношены, и восстановлению не подлежали. Но это не удивительно учитывая, где джойстики использовались. По этой причине применил тактовые кнопки. Пожалуй, к минусам тактовых кнопок можно отнести сильное щелканье, возникавшие в результате нажатия на кнопку. Но для данного проекта это весьма терпимо.
Плату с джойстиками не пришлось переделывать, оставил какая есть, что значительно сэкономило времени. Торцевые кнопки также сохранил в первоначальном виде.
В качестве приемопередатчика выбрал радиомодуль NRF24L01, так как цена весьма мала в Китае по цене 0.60$ за шт. купил. Несмотря на свою малую стоимость, радиомодуль обладает не малыми возможностями и конечно мне подходил. Следующей проблемой, с которой столкнулся, а собственно где радиомодуль разместить. Пространство в корпусе свободного маловато, по этой причине радио модуль разместил в одной из ручек корпуса джойстика. Даже фиксировать не пришлось, модуль плотно прижимался, когда собирался полностью корпус.

Пожалуй, самой большой проблемой стал вопрос с питанием для радио пульта. Покупка каких-то специализированных аккумуляторов, скажем литиевых, влетало в немалую копеечку, так как собирать решено было семь комплектов. Да и оставшееся свободное пространство в корпусе не очень позволяло использовать стандартные аккумуляторы серии AA. Хотя потребление и не значительное можно использовать разные подходящие источники питания. Как всегда, на помощь пришла дружба, коллега на работе подогнал аккумуляторы литиевые плоские от мобильных телефонов и бонусом зарядки к ним. Все же немного пришлось переделать их, но это незначительно и гораздо лучше, чем делать с нуля зарядку для аккумуляторов. Вот на плоских литиевых аккумуляторах я и остановился.
В процессе испытания радио модуль, свою заявленную дальность оправдал и уверенно работал по прямой видимости на расстоянии 50 метров, через стены дальность значительно уменьшилась. Также было в планах установить вибромотор, который реагировал, скажем на какие-то столкновения или другие действия в радиоуправляемой модели. В связи с этим предусмотрел на печатной плате транзисторный ключ для управления. Но дополнительные усложнения я оставил на потом сначала нужно обкатать программу, так как она ещё сыровата. Да и конструкция, учитывая, что это прототип требует мелких доработок. Вот так как говорится “с миру по нитке”, практически с минимальными вложениями был создан пульт радиоуправление.
Многие хотели собрать простую схему радиоуправления, но чтоб была многофункциональна и на достаточно большое расстояние. Я все-таки эту схему собрал, потратив на неё почти месяц. На платах дорожки рисовал от руки, так как принтер не пропечатывает такие тонкие. На фотографии приемника светодиоды с не подрезанными выводами - припаял их только для демонстрации работы радиоуправления. В дальнейшем их отпаяю и соберу радиоуправляемый самолет.
Схема аппаратуры радиоуправления состоит всего из двух микросхем: трансивера MRF49XA и микроконтроллера PIC16F628A. Детали в принципе доступные, но для меня проблемой был трансивер, пришлось через интернет заказывать. и платой качайте здесь. Подробнеее об устройстве:
MRF49XA - малогабаритный трансивер, имеющий возможность работать в трех частотных диапазонах.
- Низкочастотный диапазон: 430,24 - 439,75 Mгц (шаг 2,5 кГц).
- Высокочастотный диапазон А: 860,48 - 879,51 МГц (шаг 5 кГц).
- Высокочастотный диапазон Б: 900,72 - 929,27 МГц (шаг 7,5 кГц).
Границы диапазонов указаны при условии применения опорного кварца частотой 10 МГц.
Принципиальная схема передатчика:


В схеме TX довольно мало деталей. И она очень стабильная, более того даже не требует настройки, работает сразу после сборки. Дистанция (согласно источнику) около 200 метров.


Теперь к приемнику. Блок RX выполнен по аналогичной схеме, различия только в светодиодах, прошивках и кнопках. Параметры 10-ти командного блока радиоуправления:
Передатчик:
Мощность - 10 мВт
Напряжение питания 2,2 - 3,8 В (согласно даташиту на м/с, на практике нормально работает до 5 вольт).
Ток, потребляемый в режиме передачи - 25 мА.
Ток покоя - 25 мкА.
Скорость данных - 1кбит/сек.
Всегда передается целое количество пакетов данных.
Модуляция - FSK.
Помехоустойчивое кодирование, передача контрольной суммы.
Приемник:
Чувствительность - 0,7 мкВ.
Напряжение питания 2,2 - 3,8 В (согласно даташиту на микросхему, на практике нормально работает до 5 вольт).
Постоянный потребляемый ток - 12 мА.
Скорость данных до 2 кбит/сек. Ограничена программно.
Модуляция - FSK.
Помехоустойчивое кодирование, подсчет контрольной суммы при приеме.

Преимущества данной схемы
Возможность нажатия в любой комбинации любого количества кнопок передатчика одновременно. Приемник при этом отобразит светодиодами нажатые кнопки в реальном режиме. Говоря проще, пока нажата кнопка (или комбинация кнопок) на передающей части, на приемной части горит, соответствующий светодиод (или комбинация светодиодов).
Во время подачи питания на приемник и передатчик, они уходят в тест режим на 3 секунды. В это время ничего не работает, по истечению 3-х секунд обе схемы готовы к работе.
Кнопка (или комбинация кнопок) отпускается - соответсвующие светодиоды сразу же гаснут. Идеально подходит для радиоуправления различными игрушками - катерами, самолётами, автомобилями. Либо можно использовать, как блок дистанционного управления различными исполнительными устройствами на производстве.

На печатной плате передатчика кнопки расположены в один ряд, но я решил собрать что-то наподобии пульта на отдельной плате.

Питаются оба модуля от аккумуляторов 3,7В. У приемника, который потребляет заметно меньше тока, аккумулятор от электронной сигареты, у передатчика - от моего любимого телефона)) Схему, найденную на сайте вртп , собрал и испытал: [)еНиС
Обсудить статью РАДИОУПРАВЛЕНИЕ НА МИКРОКОНТРОЛЛЕРЕ
Я остановился на том, что разблокировал четвертую ось управления и установил в пульт тучку кнопок, переключателей и светодиодов. Дальше дело было за схемой, паяльником и прошивкой . Как потом оказалось, кнопок и разъемов оказалось маловато, пришлось доустанавливать.
Схема самодельного пульта радиоуправления
Схема сделана на основе микроконтроллера Atmega8. Его ножек хватило буквально «впритык». Чтобы увидеть большую схему — кликните по картинке (схема так же находиться в архиве, который в конце статьи.![]()
Подсчитаем: 10 кнопок/переключателей + 2 светодиода + 2 ножки на кварц (нам нужен точный во времени ШИМ сигнал) + 5 каналов АЦП + 2 ножки на UART + 1 канал на вывод сигнала РРМ на ВЧ модуль = 22 ножек МК. Как раз столько, сколько есть у Atmega8, которая настроена на внутрисхемное программирование (имею в виду пин RESET, он же PC6).
Светодиоды подключил на PB3 и PB5 (MOSI и SCK разъема программирования) Теперь во время заливки прошивки буду наблюдать красивое перемигивание (бесполезное в некотором смысле — но тут я гнался за визуальным красивым эффектом ).
Напомню с чего все началось — у меня в наличии появился ВЧ модуль из хобикинговской аппаратуры (он был заменен на ВЧ модуль FrSky), и была вертолетная аппаратура. Так как в аппаратуре не было никаких крутилок (да и зачем они?) то получается из шести каналов я буду нормально (штатно) использовать только 4 (по два на каждый стик). Один канал я решил потратить на 8 независимых кнопок/переключателей, еще один — программно имитировать вращение крутилки (например — красивый выпуск шасси — щелкнул переключателем, и шасси на протяжении 10 секунд выпускаются). Еще один переключатель до сих пор не определился, что с ним делать. Светодиоды, показывающие состояние переключателей — работают независимо от микроконтроллера. Один из программно управляемых светодиодов отвечает за индикацию разряженной батареи, второй — показывает текущее состояние программной крутилки.
Светодиоды, показывающие состояние переключателей — работают независимо от микроконтроллера. Один из программно управляемых светодиодов отвечает за индикацию разряженной батареи, второй — показывает текущее состояние программной крутилки.
В корпус кроме кнопок и светодиодов еще захотелось добавить стандартный (для меня) разъем UART (для связи с ПК, потом буду писать свою программу настройки), и разъем с выводом РРМ сигнала — для подключения пульта к симулятору. Помучившись с разъемом для программатора — понял, что это мне не подходит — и тоже вывел его наружу. Единственное, что плохо в этом — что появилась опасность замкнуть штырьки разъема, хотя они и «утоплены» в корпусе. Но это лечиться последовательными резисторами 220 Ом (что дает 99% гарантию, что микроконтроллер останется цел)
Когда уже вплотную подошел к использованию аппаратуры, понял, что забыл о кнопке Bind (при нажатии на которую передатчик переходит в режим поиска приемника). Пришлось допиливать и это
Печатная плата контроллера пульта радиоуправления
![]() Весьма простенькая — большая часть ножек просто выведена наружу. На плате присутствует стабилизатор на 5 вольт, и схема измерения входного напряжения. Почему использовал DIP корпус? Та просто был он у меня… кроме того — почему бы и не DIP…
Весьма простенькая — большая часть ножек просто выведена наружу. На плате присутствует стабилизатор на 5 вольт, и схема измерения входного напряжения. Почему использовал DIP корпус? Та просто был он у меня… кроме того — почему бы и не DIP…
Когда паял все это — то пробирала мысль — разве эта туча проводов будет работать?! Но все же оно работает. Обычно у меня платы чистые от канифоли… но тут уж постоянно возился с делителем, пока не оказалось, что это у меня программная проблема а не «железная». Питание от двухбаночной липольки (то, что когда-то осталось от нормальной трехбаночной, после того, как ее забыли отключить от нагрузки. В результате одна из банок ушла в полный разряд). Несмотря на это — предусмотрел возможность работы и от пальчиковых батарей. Мало ли
Но все же оно работает. Обычно у меня платы чистые от канифоли… но тут уж постоянно возился с делителем, пока не оказалось, что это у меня программная проблема а не «железная». Питание от двухбаночной липольки (то, что когда-то осталось от нормальной трехбаночной, после того, как ее забыли отключить от нагрузки. В результате одна из банок ушла в полный разряд). Несмотря на это — предусмотрел возможность работы и от пальчиковых батарей. Мало ли
В результате получил четырехканальную аппаратуру со своей собственной прошивкой, в которой я могу менять все что мне захочется. Вот о прошивке и программном обеспечении напишу потом.
А сейчас можно скачать текущую версию прошивки. Пока что не настраивается вообще (т.е. настроек реверса, расходов, смещения и прочих «вкусностей» еще нету). Просто считывается состояние крутилок и генерируется РРМ сигнал. Кнопки и выключатель MOD пока не работает. Зато работает виртуальная серва (на 5 канале) и измерение уровня входного напряжения. Если оно слишком низкое — светодиод IND начнет мигать (прошивка автоматически определяет сколько банок у литий-полимерного аккумулятора). И еще — расходы по 4 каналу (тому, где я добавлял свой потенциометр) — завышены, чтобы компенсировать неполный диапазон вращения потенциометра.